
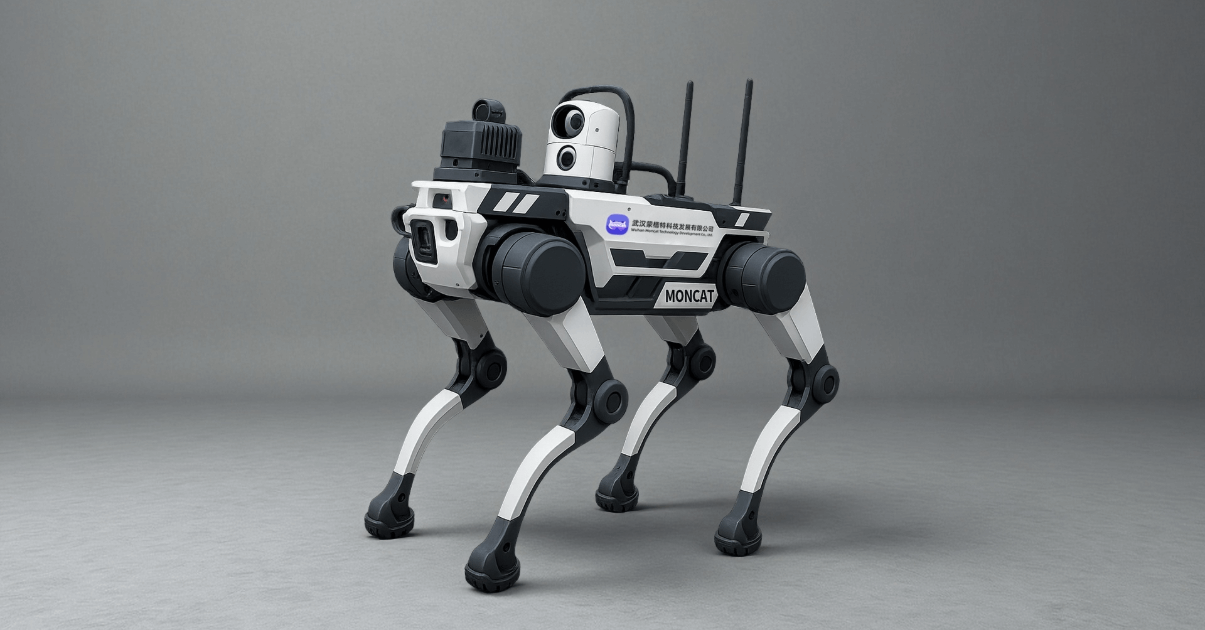
MONCAT 四足机器人
MONCAT四足机器狗具备仿生步态、自主避障与复杂地形适应能力,
可胜任巡检、安防、救援等多场景任务,
是智能移动作业的新一代解决方案

传统人工搜救
作业安全性风险高
二氧化碳,氯化氢等,灾后泄露气体超过一定浓度,坠落物,触电对人体造成伤害
信息采集不足
灾后常面临烟雾浓度过高,可见度低,灾后环境复杂,障碍物导致视线受阻、视角受限,现场
救援人员与指挥中心所获得的信息碎片化
传统机器搜救
场景适应性有限
对废墟、石堆、楼梯等复杂地形适应能力弱,难以跨越较高障碍物难以深入室内环境
灵活性不足
在复杂、未知环境中转向难、灵活性较低,自重大,在未知地形下有踩压受困人员或改变原有环境
的风险,可能引发二次事故

MONCAT 四足机器人
单级台阶高度40cm
约360N.m
≤40°
持续行走负载:20kg
最大作业负载:40kg
足式移动3m/s
轮式移动8m/s
足式移动10km
轮式移动25km
多行业应用
全新行业级产品系列,聚焦于电站运营、工业制造、管廊维护巡查、应急救援行动
消防安全侦察及未来科学研究等多个领域
旨在以卓越的全球行业领先优势,精准响应并超越这些领域的核心挑战与需求
电力巡检
金属冶炼
建筑测绘
应急救援
科研教育
管廊隧道
工厂巡检
